
北京,2026年4月27日——在2026北京车展期间,卓驭科技正式发布原生多模态基础模型,并宣布该模型已进入跨垂类规模化量产阶段。这是全球智能驾驶行业从“数据驱动的端到端”向“通用智能的物理交互”跃迁过程中,首次有企业同时完成技术定义与大规模落地验证。
业内普遍认为,智能驾驶经历了“规则驱动”(1.0)和“场景数据驱动”(2.0)两个阶段后,正在迎来以“物理智能”为核心的第三次技术范式跃迁。卓驭的原生多模态基础模型,正是这一跃迁的首个系统性技术答卷。

技术突破:让AI内化物理世界通用规律
据卓驭科技技术团队介绍,当前主流的端到端方案本质是“行为统计模型”——通过海量驾驶视频学习人类操作的相关性,但并不理解背后的物理因果。这种范式在面对训练数据分布外的长尾场景时,可靠性显著下降。
原生多模态基础模型从根本上改变了训练逻辑。模型在预训练阶段输入的不再局限于驾驶场景,而是涵盖互联网物理交互视频、各类移动机器人运行日志、全球主要国家交通规则文本等海量多模态数据。 通过统一的表征框架,模型自主学习并内化了诸如惯性、摩擦力、碰撞代价、路权优先级等物理世界通用规律。
这意味着,当车辆遭遇从未见过的施工改道、异常天气或异形障碍物时,模型不再依赖记忆中的相似案例,而是基于物理常识进行实时推理决策。卓驭内部测试数据显示,在典型长尾场景下,原生多模态模型的通过率较上一代端到端方案提升了40%以上。
该模型的核心能力被总结为 “Zero Shot零数据知识迁移” ,包含三个维度:
跨垂类开箱即用:同一模型无需重新训练即可从乘用车迁移至重卡、客车、物流车等;
全球零泛化:预训练阶段融入全球主要交规与驾驶习惯,出海适配成本大幅降低;
全场景通用:覆盖铺装与非铺装路面、室内外环境,已拓展至低空无人机。

量产实证:34家客户、130余款车型完成搭载
与诸多停留在实验室阶段的技术不同,卓驭的原生多模态基础模型已在多个垂类完成规模化验证。
乘用车方面,卓驭累计量产车型突破50款,定点车型超过100款,实现了“油电同智、中外同频、舱驾同芯、行泊同优”的全覆盖。高悟性端到端4.0(100%“端味”)已于今年4月起通过OTA陆续推送。基于原生多模态模型的下一代智驾系统,已率先搭载于红旗天工S概念车。
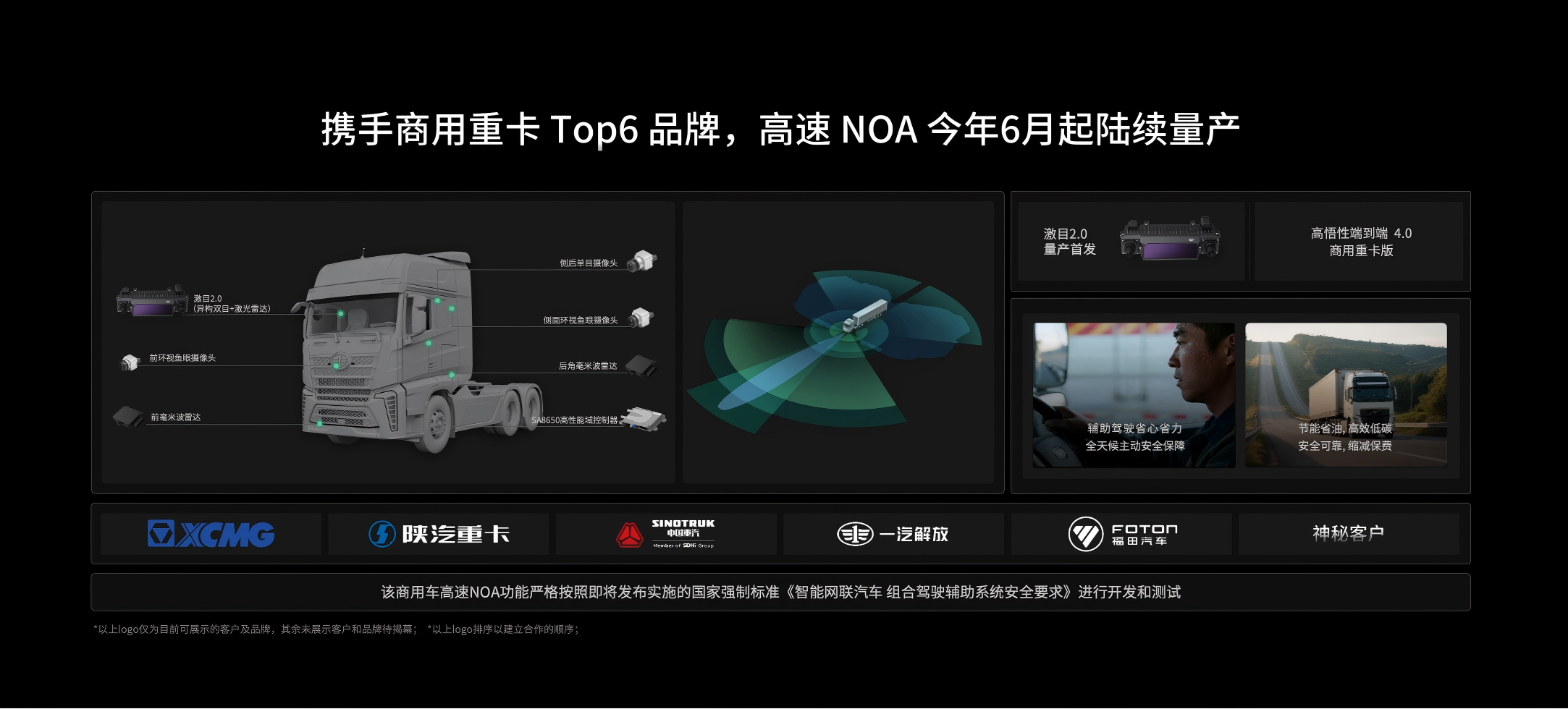
商用车方面,卓驭与中国重汽、一汽解放、陕汽、东风等TOP6重卡品牌全部建立合作。独创的激目2.0舱内激光视觉融合系统,配合原生多模态模型,使重卡NOA在安全性和燃油经济性上均取得突破。搭载该方案的车型将于今年6月起陆续量产交付。此外,卓驭与宇通客车合作的NOA方案将于9月量产,覆盖高速、城区及自主泊车。
无人场景方面,无人物流车计划于今年7月启动试运营,Robotaxi将于下半年开启试运行。两者均直接基于原生多模态基础模型及自研L4级三余控制器(双英伟达Thor芯片)。
低空领域,卓驭后装车载无人机将于Q3量产,将移动物理AI延伸至“天地一体”出行生态。
截至目前,卓驭已携手34家客户,合作车型突破130款,成为智能出行领域首个实现多垂类、多场景、多客户、大规模落地的科技公司。
产业意义:成本结构与全球化能力的双重重构
卓驭科技CEO沈劭劼在发布会期间指出,基础模型的训练成本已攀升至每年数十亿元量级,唯有将同一模型应用于最大数量的移动载体,才能摊薄固定成本、形成商业正循环。“所有智驾公司最终都必须转型为移动物理AI公司。这不是战略选择,而是生存判断。”
行业分析人士认为,原生多模态基础模型的推出,实质上重构了智能驾驶的成本结构——固定成本高昂但边际成本趋零,规模效应前所未有。同时,凭借“全球零泛化”能力,中国智驾方案出口海外的适配成本从“数十人月”降至“数人周”,为行业全球化扫清了关键障碍。
北京车展期间,卓驭在展台开放了基于英伟达Thor平台、11V视觉方案及激目2.0系统的原生多模态基础模型实车试乘。据悉,该模型将于2026年内正式推送至乘用车及商用重卡,并作为卓驭智能驾驶出海的基础模型。

标题:智能驾驶“第三次跃迁”:卓驭科技开启移动物理AI时代
地址:http://www.0317jhgd.com//dfqcdg/40070.html
心灵鸡汤:







